Warning
Important Notice: The DynaArm is currently a prototype and not ready for commercial use. It is intended solely for research and development purposes. Users are responsible for ensuring safe operation during its use.
DynaArm Documentation
Quick Start Guide:
Robot Operations:
Integration Guide:
Developer Resources:
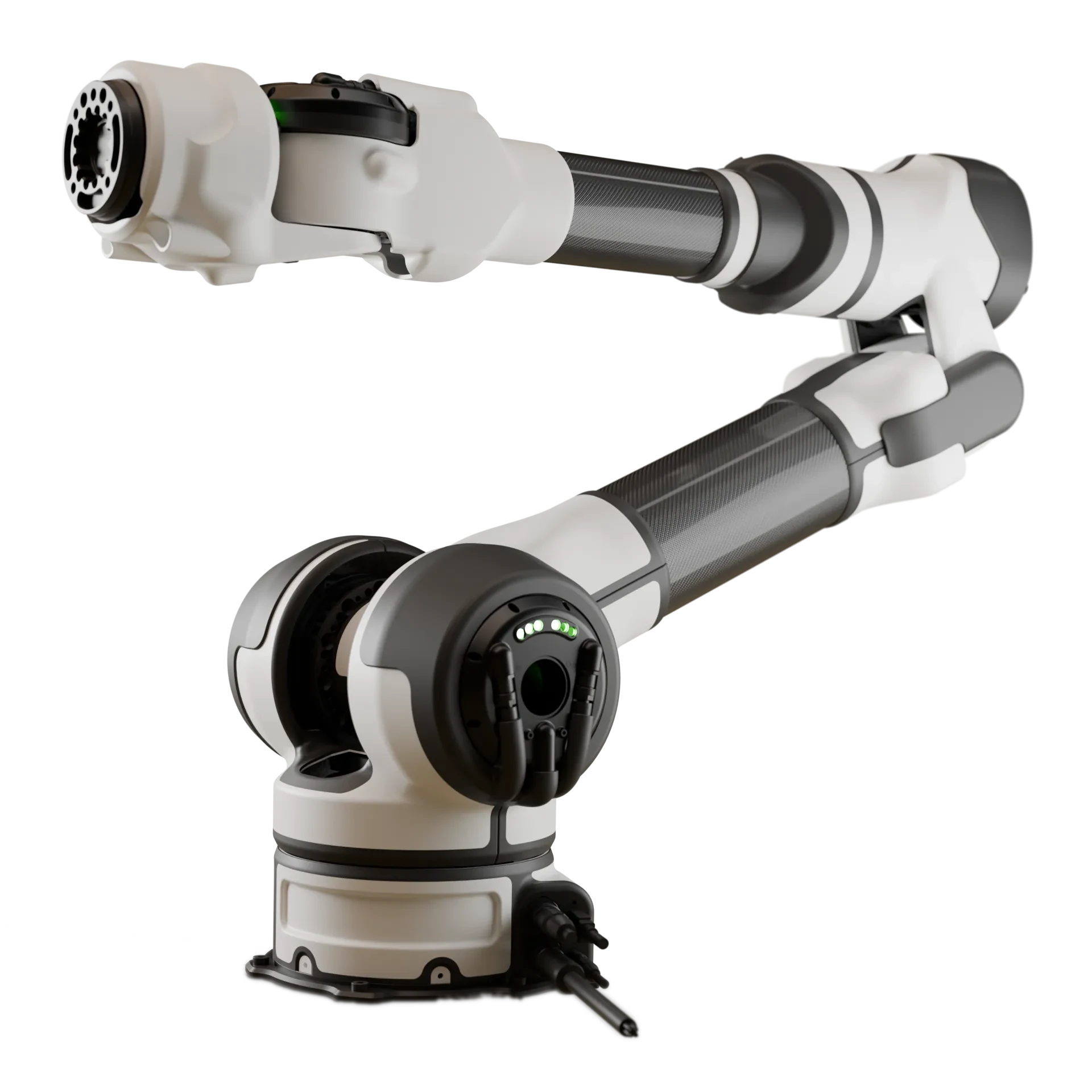
Overview
The DynaArm is a 6-DOF, high-performance robotic arm designed for contact-rich manipulation, ease of use, and demanding applications in unstructured environments. Combining advanced hardware with modular software, it delivers powerful performance for research, industry, and prototyping.
With its significant payload capacity and lightweight, compact form factor, the DynaArm achieves exceptional speed and agility through innovative pseudo-drive technology. Its design emphasizes high transparency and backdrivability, enabling dynamic, precise movements and facilitating seamless human-robot interaction for collaborative operations.
Documentation Overview:
Quick Start Guide: Introduction and getting started guide to get your robot running
Robot Operations: System setup, daily operation, and troubleshooting
Integration Guide: Hardware integration, safety guidelines, and technical specifications
Developer Resources: Software components and development information
Target Audience
This documentation is intended for:
Researchers and Developers: Engineers, software developers, and researchers who wish to contribute to the system’s development or integrate it into experimental setups.
Resources
For additional resources, visit the DynaArm homepage.
Built on 2025-11-26 at 01:23 GMT